Video: Robot Gripping by Granular Compression
An alternate approach to robot gripping readily conforms to the shape of many different target objects.
Share














A typical industrial robot has a form and function suggestive of a human arm. Does that mean the robot gripper ought to work like human fingers or a human hand?
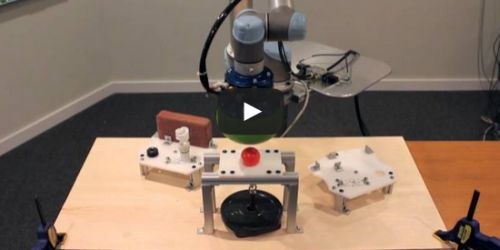
This video demonstrates an alternate concept for robot gripping. The “Versaball” from uses the compression of granular material to achieve its gripping force. This demonstration of the gripper on a robot arm from Universal Robots illustrates the strength, precision and control of the grip, not to mention its versatility, by lifting and relocating objects including a weight, a brick and a light bulb.
Related Content
-
3 Ways Artificial Intelligence Will Revolutionize Machine Shops
AI will become a tool to increase productivity in the same way that robotics has.
-
Using Jaws as Grippers Enables Flexible, Low-Cost Automation
VersaBuilt’s automation systems significantly boosted Innovative Fabrication’s revenue. In return, the shop has helped VersaBuilt optimize its products.
-
Setting Up the Building Blocks for a Digital Factory
Woodward Inc. spent over a year developing an API to connect machines to its digital factory. Caron Engineering’s MiConnect has cut most of this process while also granting the shop greater access to machine information.